A New Driver
27 December 2025
Switching from a L298N to a TMC2209 was much harder than I thought.
When I first got the TMC2209 I expected to connect my stepper motor and then start testing torque with it but I should've known that it would not be that easy.
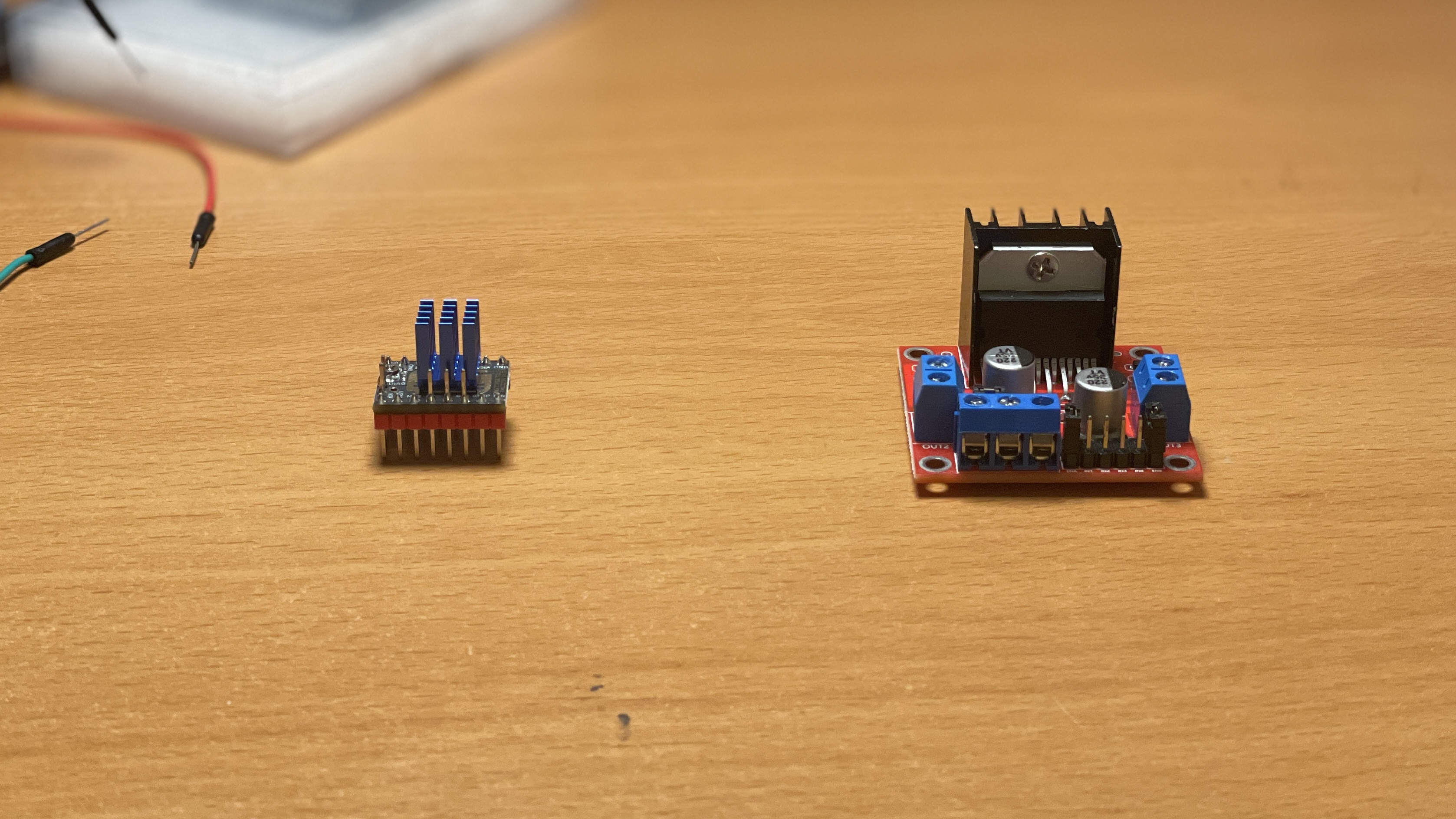
The driver on the right is almost 5 times older than the one on the left
So you would expect the new one to be
- Quieter
- Easier to set up
- And way faster
But in reality it was
- Only slightly quieter
- And much harder to set up
When I plugged everything into the new driver my first impressions where very good, but that all dissapeared when I realized how little torque it was outputting.
So my first idea after googling my issue was to turn the potentiometer on the driver to increase torque but after turning it a bit too much the driver just stopped working.
I still don't know why it broke, but after that I decided to not use the potentiometer on my second driver.
After really long time of reconnecting, rewiring, and coding later I finally realized that the guide I told me to connect only one, not both, of my PDN pins into two of the microcontroller pins, one for input and the other for output, with a resistor.
In the end the result was a decently quiet motor and harmonic drive
It sounds louder in real life than in the recording