Motors and Pulleys
17 January 2026
Today the motors arrived and there were 6 in total. There were 2 nema 23s and the rest were nema 17s. I also got a belt, gt2 pulleys, a slip ring, and a turntable bearing.
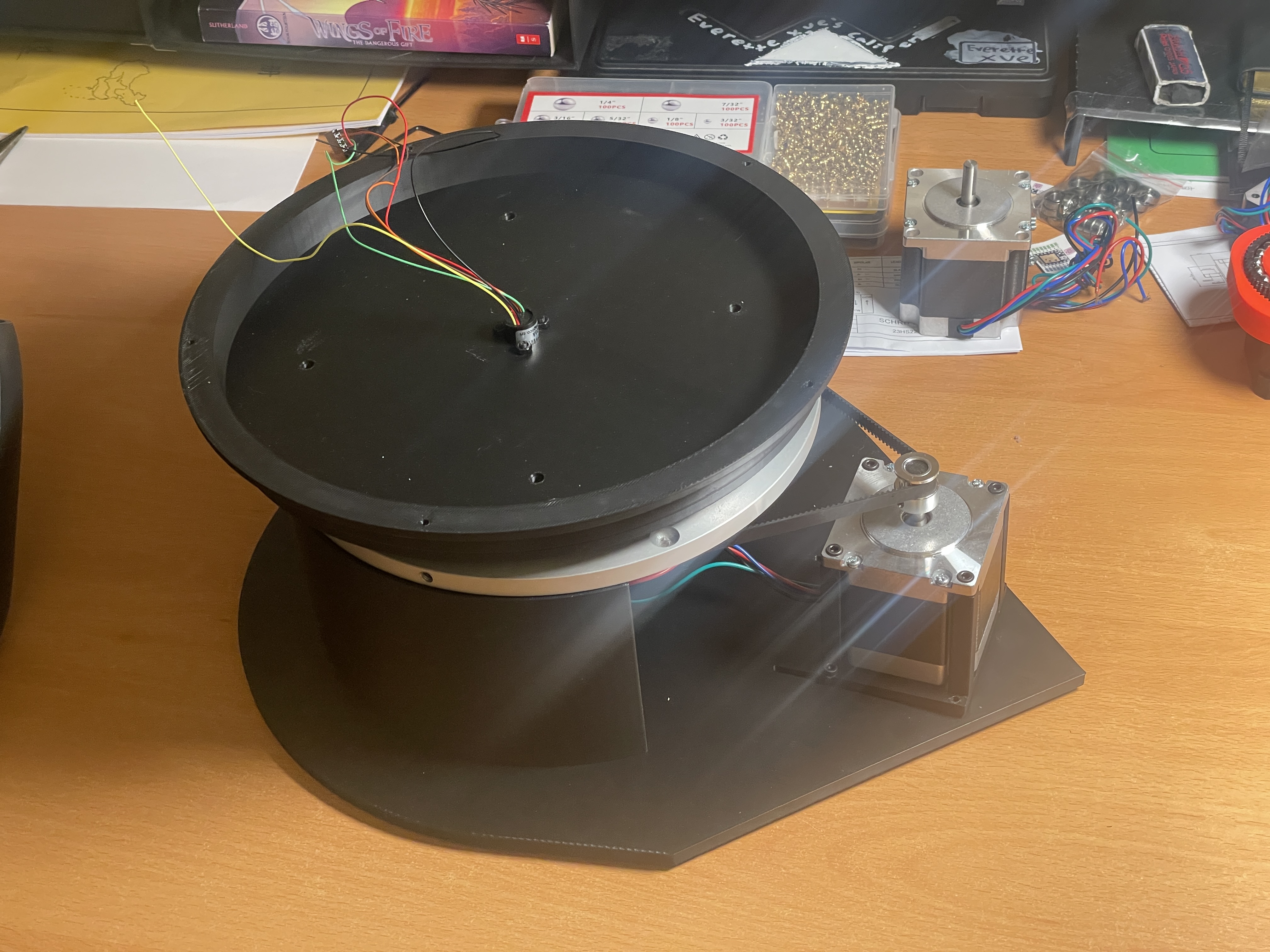
I wanted the robot arm to be able to spin infinitely without the wires twisting so i put a slip ring in the center.
I also used a 1:10 belt reduction so there would be enough torque for the turntable.
I also bought a wire crimper because most of the wires were bare so i bought it to convert them to jumper wires.
I only realized when I was almost done assembling the parts that the power source can't be attached to the slip rings because the slip rings current rating was too low.
Once I was done with turntable, I started printing the top half of turntable to hold the other joints, but when I printed it I realized I just printed a copy of the bottom layer but bigger so I had to throw away 200 grams of filament because it couldn't be attatched.
My idea was to put a 2 part design ontop of bottom holder where the 1st part would be a holder for the 2nd part which would be where the other joints would be attatched to so if i needed to make a change, i would only need to reprint the 2nd part which is much smaller.
Once I was done I started to design the first joint which I needed a lot of torque for so I used the harmonic drive I designed already to test the torque, but the one I designed was a 1:37 reduction which was way to much but I still tested it and the teeth started slipping at 1kg at the tip of an 8 inch arm.

This was my finished design for the gearbox.
I think now I am going to make a smaller gearbox reduction and finish the first joint in the next devlog.